2016年7月5日,位于贵州黔南州平塘县大窝凼的世界最大单口径射电望远镜——500米口径球面射电望远镜(FAST)最后一块(第4450块)反射面板缓缓起吊,被顺利安装在索网上,标志着这一“观天巨眼”主体工程顺利完工。在这个备受世界瞩目的大科学工程中,自动化所也参与其中,自动化所复杂系统管理与智能控制国家重点实验室先进机器人控制与系统研究组承担了FAST“馈源支撑整体控制系统项目”。
让望远镜的“瞳孔”精准地运动
1994年开始,通过不断探索,中国天文学家提出在贵州喀斯特洼地中建造“500米口径球面射电望远镜”(FAST)的建议。历经12年的预研究,2007年国家重大科学工程——500 米口径球面射电望远镜FAST项目获国家立项批准。又经过6年的艰苦努力,2013年12月,FAST主体圈梁合拢,2016年7月3日,最后一块反射面单元被顺利安装在索网上,这标志着“观天巨眼”FAST的主体工程顺利完工,预计于今年9月全部竣工。
在项目总体组公布的方案中,FAST工作最重要的创新点有三:一是利用独一无二的贵州天然喀斯特洼地台址;二是应用主动反射面技术在地面改正球差;三是采用轻型索拖动机构和并联机器人,实现望远镜接收机的高精度定位。这第三点就必须依靠自动化所科研人员的智慧。
如果说FAST是一只“观天巨眼”的话,那么馈源舱就相当于这只眼睛的瞳孔,它起到一个聚焦的作用。项目负责人景奉水研究员告诉我们:FAST工程由于巨大的空间跨度,在接收机与反射面之间难以建立紧密的连接。为此,建设方在望远镜的圆周设计了六个均匀分布的支撑塔,采用六根支撑索将望远镜的瞳孔——馈源舱——悬吊于空中。支撑索通过支撑塔上的导向滑轮与地面上的驱动设备连接,通过驱动设备改变支撑索的长度,使望远镜的“瞳孔”能够在百米尺度大工作空间内实现瞬时聚焦,实时地达到毫米级高精度定位,从而实现对天体的高精度指向跟进观测。如何让这颗“瞳孔”在百米高空实现精准运动,这成了自动化所科研人员需要攀登的技术高峰。
“我们的总体设计是,将馈源支撑整体控制系统分解为‘索驱动控制系统’和‘馈源舱控制系统’两个部分,但在实际操作中,还有很多问题要解决,比如:这两个结构一柔一刚,这种刚柔并存的结构设计方式必然使系统的运动相互影响,在控制上具有强耦合、非线性、大延迟等特性”,景老师解释说,“这个复杂的系统是对我们科研能力的极大挑战。”

馈源支撑控制系统:承上启下的中枢
为了解决精准控制的难题,馈源支撑整体控制系统必须成为整个FAST系统的中枢,起到承上启下的作用。科研人员告诉我们,馈源支撑整体控制系统有两大任务:向上——要连接FAST总控系统,接收总控指令并按照要求反馈馈源支撑系统的运行状态。向下——连接索驱动系统和馈源舱系统,根据不同天文观测的要求,经过一系列复杂的运算过程,发送指令给索驱动和馈源舱两个系统。此外,这套系统还要维持实时数据和历史数据库,保存各相关系统的运行状态信息,并能够按照要求查询并反馈状态信息。
经过项目组成员的多次讨论,馈源支撑整体控制系统的任务逐步明晰起来——既要求实时和非实时的大数据量传输(FAST总控和馈源支撑测量系统数据传输),也要求实时的关节运动控制(索驱动和馈源舱系统运动控制),这就需要系统具有在远距离、高速度、大数据量下的实时同步传输能力。基于对任务的充分理解,项目组成员创新地提出了“基于POWERLINK的实时工业以太网馈源支撑整体控制系统方案”。
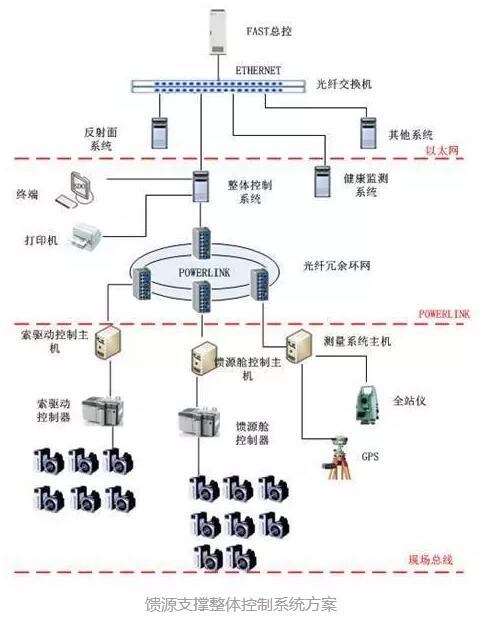
在这个复杂的方案中,项目组采用模块化的思想,将馈源支撑整体控制系统划分成多个互相联系的功能模块:人机交互模块、天文轨迹规划模块、通信模块、数据处理模块。同时,FAST馈源支撑整体控制与系统外各相关系统(FAST总控系统、反射面控制系统等)通过以太网和光纤交换机相连接,用来传输各类数据。
在介绍项目的整体情况时,景老师特别提到多通道、多源数据的采集和处理,这是项目组面临的又一大难题。由于测量系统使用的仪器设备包括多台GPS-RTK和全站仪,本身就存在数据的时滞和不同步现象,而控制任务又要保证实时性,要让大量的数据在同一个系统中运行。经过多番的研究,项目组又提出了“基于新息重组的卡尔曼滤波算法”,通过选择高频通道测量数据重采样或高频通道测量数据间隔采样的思路,有效地解决测量时滞和不同步带来的状态估计问题。关于该成果的学术论文已被控制领域的顶级刊物TAC所录用。
“在我们目前的方案和前期模型中,馈源支撑整体控制系统已经能出色的实现上述功能。2015年10月28日该系统已顺利通过了国家天文台组织的出厂验收,并已在贵州大窝凼的FAST建设工作中发挥了作用。除此之外,我们开发的测量子系统以及5个相关子系统的POWERLINK通信接口,也受到了高度评价。目前项目组人员正在现场与多个相关系统联调,计划今年9月底完成项目验收工作。”景老师欣慰地说。

厚积薄发显真功
“馈源支撑整体控制系统”花落自动化所并非偶然,这得益于自动化所前期雄厚的技术积累。
为了保证FAST工程的顺利实施,国家天文台在密云观测站建立了一个基于13:1动力学相似律的缩尺模型(简称密云模型)。早在2011年1月,研究团队便和国家天文台合作,承担了“FAST馈源支撑控制方法优化与仿真”项目研究任务,先后完成了“FAST原型馈源支撑控制系统仿真”“Stewart室内模型控制系统升级改造”“密云模型馈源支撑系统恢复”和“馈源支撑控制软件开发”等任务,为承担FAST系统工程任务积累了大量宝贵的经验。
项目组副组长杨国栋老师告诉我们,在密云模型上,研究团队提出了新的馈源支撑系统测量与控制方案,进行了一系列的理论分析验证与控制方法实验。通过模型恢复过程加强对模型软硬件系统和模型整体运行状态的了解,掌握馈源支撑控制系统中的难点。正是在预研阶段的全力投入,才有了后期项目的落地花开。
2014年8月1日,“FAST馈源支撑整体控制系统”中标通知书正式下达,标志着科研人员前期的努力有了结果,也标志着一个新阶段的开始,研究团队将面临前所未有的调整,遇到的困难也会是难以想象的。
首先是理论成果与实际应用的有机结合,特别是在国家重大工程任务中安全、可靠、高效地实施我们的前期研究成果是团队需要面对的第一个难题;其次是各个系统的协调与协作,我们的工作在整个FAST工程中起到承上启下的重要作用,与相关系统的衔接以及与数个承担单位的沟通配合将会给大家带来全新的考验;最后是体力和精力的考验,FAST是一个工程项目,需要项目组长期驻扎在贵州偏远的大窝凼现场,条件艰苦。
景老师说,正因这个项目的难度和影响较大,团队领导谭民研究员极为重视该项目,亲自指导。另外,梁自泽、李恩、张雪贞等老师和孙尧、邓赛等多位研究生也先后参加了该项目。同时复杂系统管理与智能控制国家重点实验室办公室主任闫研也做了大量与天文台的协调和沟通工作。
谭民研究员对项目组寄予了厚望:“这个项目的难度很大,但能参与到国家重大的工程任务中,真正为国家重大需要做出贡献,我们认为是一件很有意义的事情!自动化所拥有2.16米天文望远镜控制系统的成就,虽然我们的工作不能与之相提并论,但希望通过我们的努力,让大家看到自动化所机器人团队的实力!”
1992年,由国家天文台和自动化所等单位共同完成的“2.16光学天文望远镜”荣获国家科技进步一等奖,该望远镜是当时东亚最大口径的望远镜,对我国天文学的发展起到重要推动作用。其中,自动化所完成的“2.16光学天文望远镜控制系统”在定位精度和跟踪运动能力方面达到了同期同类国际控制系统的水平。
