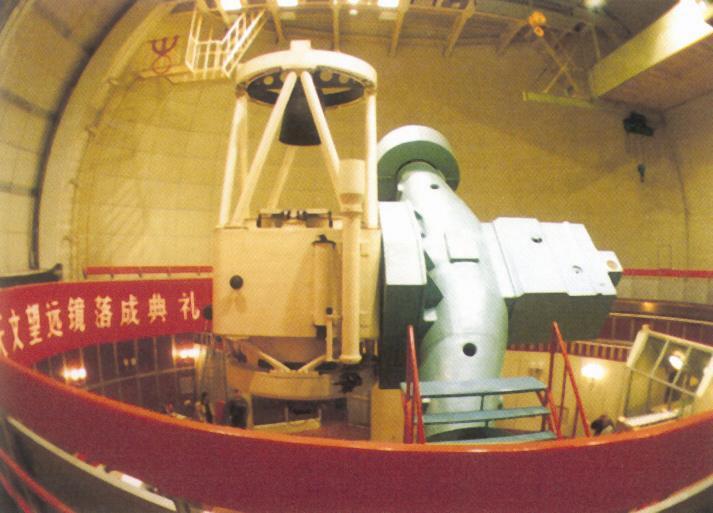
【编者按】2.16米光学天文望远镜是由中国科学院国家天文台、自动化研究所等单位共同研制,1989年在北京天文台兴隆站完成全部安装并投入使用。它被誉为中国天文学发展史上一个里程碑,是当时东亚最大口径的望远镜,对我国天文学的发展起到重要推动作用。1998年获国家科技进步一等奖。自动化所承担了2.16米望远镜赤经赤纬驱动系统及计算机控制系统的研制工作。
本文是黄玉棠、竺松(已故)两位研究员对2.16米大型天文望远镜研制过程的回忆与总结,前辈们在艰难的条件下走过的路和取得的成绩,对于今天的工作仍有借鉴意义。
为了加快发展我国的新技术,追赶国际先进水平,1956年制订我国科学技术发展远景规划,自动化研究所作为四大紧急措施之一,由中国科学院进行筹建,至今已整整45年,自动化所由最早的一个较小的研究机构成长为今天具有一定规模的科研单位,并给国家建设做出了多项研究成果和重大贡献。
1958在十二年科学发展远景规划中,为了开展我国的天文研究工作,光学专家龚祖同和天文学专家程茂兰提出研制2.16米望远镜的设想。从口径来说,当时可在世界上排行第五。天文望远镜是研究天文学必不可少的重要仪器,它的口径越大,收集到的光能量越多,观测的距离就越远,就能对更遥远的天体进行观测。但研制大口径望远镜的技术难度很大,它标志着国家的科学技术和工业发展的综合水平。中国科学院在50年代后期,成立了216办公室,组织了北京天文台、南京天文仪器厂和自动化所合作开展调查和研制工作。当时我国在这方面是毫无经验可循,只能是依靠自力更生和不怕困难的精神,踏实地开展研究工作。同时,中科院决定先研制60公分中间试验望远镜,这可从中取得经验并培养出有一定水平的科技队伍,使2.16米望远镜的研制有人力和技术上的保证。
2.16米望远镜是大型的精度要求很高的观测仪器,它包含光、机、电三个主要系统、技术难度很大。
1、光学系统,要求接收较多的光能量,并聚集到一个小范围内,这个范围越小(0.1²),则望远镜效率就高,能观测到较远的暗弱星体,2.16米望远镜光学系统的设计是很成功的,在国际上领先并有所创新。
2、机械系统,望远镜结构巨大,仅转动部分就重达90多吨,要求安装精度很高,所需的转动力矩要很小,转动平稳,须采用静压油垫轴承,一般只须3W的功率即可使望远镜进行跟踪运动。此外镜筒弯沉引起的误差,必须得到解决。
3、赤径赤纬驱动及计算机控制系统,望远镜研制周期很长,投资也很大,这就需要充分发挥使用效率,也就是要求望远镜能在较短的时间内完成定位对星和高精度跟星观测。由于天文现象过去后就不可返回,并且也只能在夜间晴朗的天空观测,因此要求用最短的时间获得观测的数据资料,以便在一个晚上可进行多项观测任务。望远镜是安装在地球上,由于地球有自转,望远镜与被测天体之间便有相对运动,从地球上看,天体是在天空中运动,望远镜就必须从茫茫的天空中用最短的时间,找到它的位置,去对准它和跟踪它。有时需跟踪数十分钟才能获得所需的观测数据,这就要求系统精度很高,运转必须十分平稳,这都要在计算机控制的情况下完成。
上述的第三项工作,赤径赤纬驱动系统及计算机控制系统的研制是我所承担的任务。
1959年开始了60公分望远镜的研制工作,我所承担了光电导星、园顶随动和计算机等方面的研究工作。经数年的研究试验和现场调试,1968年60公分望远镜在北京天文台的兴隆站安装调试完成。但由于赤径赤纬传动系统原结构设计是采用同步电机驱动,电机转速高,传动链过长,望远镜跟踪观测时,产生严重的爬行现象,观测工作无法进行。在较长一段时间内,一直未能投入正常使用。
1974年中科院重新起动望远镜工作,组织北京天文台、南京天文仪器厂、自动化所组成现场调查组,对60公分望远镜进行现场调查,了解存在的问题,并提出解决方案,决定原赤径赤纬系统改用我所当时的研究成果,低速力矩电机直接驱动数字锁相控制系统,取代原同步电机驱动方案。1975年赤径系统改装完成,系统运转平稳,接着赤纬系统也进行了改造,使用情况良好,正式投入使用。
1977年3月发生一次罕见的天王星掩星事件。在60公分望远镜上取得了很好的光电测光资料,在长时间的使用中在天文观测方面取得了大量的观测数据。
1974年2.16米望远镜作为国家重点研究项目正式下达,我所于1975年重新安排赤径赤纬驱动系统及计算机控制的研究工作。
要使系统达到角秒级的定位和跟踪精度,必须采用新的高技术手段,我们的任务主要是:
1、赤径赤纬驱动系统,以我所当时的研究成果低速力矩电机数字锁相控制系统为基础,进一步发展了双力矩电机驱动,消除赤径传动中齿隙引起的误差,采用高精度光栅作为速度跟踪用的检测元件,结果很好。赤径系统的定位精度优于1.1角秒,跟踪误差(短周期)为0.025²,跟踪速度可微调,以保证不同天区的跟踪、补偿极轴偏差、镜筒弯沉、以及大气折射所产生的误差。另外赤纬系统的定位精度达±1角秒。
2、轴角检测系统,要求精确地测出轴角的位置,当时的光学分度头也只能测到2角秒的数量级,而望远镜则要求测到1角秒的读数。我们的轴角检测系统采用粗精二级四通道多极旋转变压器检测装置,应用鉴相测角原理,并进行数据处理,在360°的连续检测中,分辨率达到1角秒,这在国内来说,当时也是首例。
3、计算机控制系统采用总线工业控制机组成的工业控制网络,进行信息管理、函数计算及逻辑控制、轴角检测的数据处理、赤道坐标和地平坐标转换、存储星表以及控制望远镜进行自动定位、交替对星、急停保护、人机对话等工作。在国内大型望远镜控制系统中,首先采用微机局域网络控制,在不同的控制单元中分别由各自的智能CPU控制,再由上位机对它们进行协调管理,软硬件统筹考虑,实现实时改正蒙气差、机械弯沉、极轴误差等。跟星精度达±1²/30分钟的水平。
2.16米望远镜计算机控制课题组,自七十年代中期立题以来,经历了一期和二期工程十多年的努力,不断更新、改进、提高,方案中有许多创新之处,指向定位和跟踪精度大大超过原计划要求的指标,计算机控制系统已达到九十年代国际同类设备的水平。为我国和全球天文事业作出了重大贡献。
望远镜1989年在北京天文台兴隆站安装完成,并进行了光、机、电三个部分的联合调试后,开始运行使用,并经过8年多的不断完善,已获得了大量的观测资料。1996年通过了国家鉴定,这期间,2.16米天文望远镜已取得大批优秀成果,已成为我国和国际上最主要的观测设备之一,也为今后我国建造更大的天文望远镜走出了第一步。
我所承担的天文望远镜控制的任务,历经三个阶段:
60公分望远镜的研制开始于1959年,我所承担光电导星、园顶随动等工作,1968年在兴隆站安装调试完成。主要工作人员有毛绪瑾、林庆伦、倪宏谊等。
60公分望远镜赤径赤纬系统的改造,自1974年起至1976年完成。参加试验及改造主要人员为张雯、王之堂等。
2.16米望远镜赤径赤纬驱动系统及计算机控制系统的研制工作,自1974年开始至1996年完成。主要参加人员为黄玉棠、竺松、张景明、陈方丞、刘小延、王之堂、罗瑞瑞、侯丽雯、宋湛复、杜育凡、郑京生等。